发布日期:2018-05-15 08:17:53
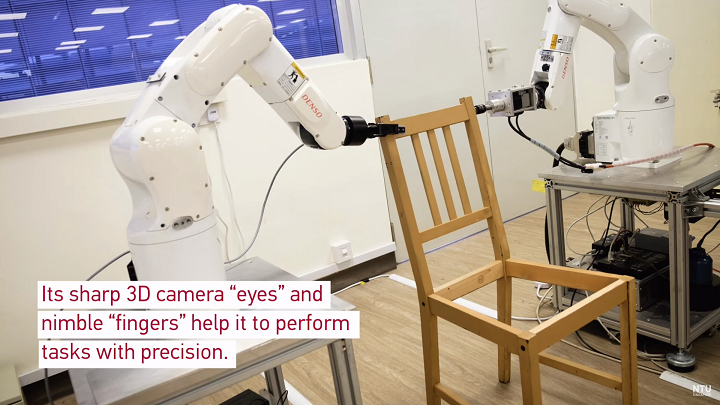
对于工人来说,组装家具是一件极其简单的工作,但如何让机器人来组装家具那就是一件比较复杂的事了。 经过三年的研究,来自南洋理工大学的机械和航空航天工程学院已经开发出一种自动化家具组装机器人,该机器人由两个机械臂和夹具以及一个3D摄像头组成。上个月,由FranciscoSuárez-Ruiz博士,大学校友Xian Zhou和助理教授Quang-Cuong Pham组成的NTU团队在科学机器人杂志上发表了一篇关于他们的机器人结果的论文,标题为“机器人如何制造宜家椅子?“这些研究得到了新加坡教育部、新加坡 麻省理工学院研究与技术联盟(SMART)以及南洋理工大学(NTU)创新和企业部门NTUitive的资助。

首先,机器人将部件的3D照片展开,以便快速处理他们在地面上估计位置的可靠地图。根据NTU的说法,这有助于复制“人类解放后的混乱环境,并准备将自己制作的座椅放在一起”。来自三个开源库的编码算法,由团队设计,帮助机器人用“双手”计划一个快速,无碰撞的运动,这个“双手”也集成了触觉和视觉感知。机器人手臂用于抓取碎片和执行简单任务的力量,如插入那些小木塞,必须加以调整。正如Pham教授所解释的那样,这很难做到,因为工业机器人在精确定位上比在力量调节方面更好。

Pham教授表示,直到目前为止,灵巧操纵的自主演示只能用于更多“基本任务”。“一个原因可能是人类环境中复杂的操作任务需要许多不同的技能,”Pham教授解释说。 “这包括能够绘制物品的确切位置,规划无碰撞的运动路径,并控制所需的力量。在这些技能之上,你必须能够管理他们之间复杂的相互作用。“
现在他们已经达到了展示机器人建立宜家椅子能力的目标,该团队正在与各家公司合作,将这种类型的操作应用于多个行业。例如,他们目前正在为机器人准备用于玻璃粘接的工作,这在汽车应用中很有用。
本文转载自:中国3D打印网 版权归原作者所有